看!会“变身”的无人机
水空两栖无人机
鲁仁全
陆空两栖无人机
科技赋能生活,说起无人机,很多人不再觉得稀奇。但是,会“变身”的无人机,你见过吗?本期“趣探实验室”走进广东工业大学智能决策与协同控制研究所,看这里的无人机如何机智“变身”,玩转水陆空。
研究所在做什么?长江学者、国家杰青、广东工业大学智能决策与协同控制研究所所长鲁仁全解释,理论上来说,实验室重点研究智能决策和协同控制,通俗地说,就是通过算法给无人自主系统“下命令”“做调度”。特定环境下拥有特殊功能的自动载体,这是团队组建之初便定下的研究方向。发展至今,团队已有水空两栖、陆空两栖、16旋翼大型载人无人机、无人车等四款主打载体产品,主要应用于水库巡检、水质检测、电力巡检、智慧文旅等民用领域。
聪明“大脑”发令 无人机能飞也能游
走进广东工业大学智能决策与协同控制研究所,记者一下子就被展架上一字排开的一排排无人机所吸引。别看它们外貌相似,功能却大有不同,航拍、航测、巡检、定位……想要无人机做什么,给它装上适配的“大脑”,下达相应指令即可。
更让记者觉得眼前一亮的,当属可以“变身”的水空两栖无人机。“空中能飞,水下能游”,简单几个字,实现起来却并不容易。“空中飞的时候是旋翼的形式,下水游的时候就不能旋翼了,旋翼阻力太大,就要把它收起来。”鲁仁全介绍,这一“下”一“收”,发挥关键作用的便是变结构无人自主系统。
不同于传统变结构控制理论,团队重点研究机械结构突变、运行环境突变和网络拓扑突变的无人自主系统基础理论与关键技术,具有重要的理论和应用价值。正是团队的创新研究成果“变结构姿态控制”,得以让无人机在由空入水时实现高效平稳姿态控制。据了解,这也是团队的独有技术,团队因此也获评2021年国家自然科学基金委创新研究群体项目。
“控制和校正是同时的,如果校正时有延时,无人机就掉进水里了。”鲁仁全介绍,这款水空两用无人机有自己的“眼睛”和“耳朵”,除了按照既定的控制信号工作,当它判定周遭环境发生了变化,会自动适应校正,实时调整参数切换到水下模式,通过控制下潜的角度和深度等关键参数,稳稳潜入水下。目前,团队已经具备了独立研发和制造变结构无人自主系统的能力和条件,研发的水空两用无人机已成功应用于水体采样、水库巡检等场景。
此外,团队还将无人机和无人艇结合,解决了无人机充电的问题。无人机电池容量有限,因此巡航半径和时间也有限,在无人艇的支持下,无人机可以自主起飞、自主降落、自主充电,将其巡航时间和距离拓宽百倍之多。
协同控制练就“好队友”
另一款会“变身”的无人机是空中能飞、地上能跑的陆空两栖无人机。鲁仁全介绍,其典型的一个应用场景是消防救援。如遇火势较大、烟雾较浓等情况,小小无人机就派上了大用场。它可以从较小的缝隙中水平飞进火场,然后切换姿态,上下飞行进行探测,然后将火场里的信息传递出来,指导救援救火工作。
个体在特定环境下单独作战能力超群,如何保证多个载体高效协同作业?鲁仁全解释,在一个编队里,通常会有领导者及其支援体,就像一只头鸟带领鸟群飞向目的地那样,每个成员的功能不一样。如果有成员掉队失联,此时网络拓扑结构发生变化,通讯方式也就随之发生改变。不同能力的载体如何协作?通讯不畅时怎样完成任务?这些都是协同控制需要直面的“难题”,团队在协同控制领域的代表性研究成果——异构无人自主系统协同控制理论与技术有效解决了这一问题。
“它走的路越多,会越来越聪明。”鲁仁全说,无人机也在不断地积累算法,就像人类积累经验那样,自主学习,慢慢进化。然而,载体本身算力有限,研究人员也会对其进一步迭代升级,通过调整参数让它更“聪明”。
科研面向经济“主战场”
不在实验室里“做玩具”
尽管目前团队研究的无人机的响应速度和控制精度已经基本达到所需预期,但鲁仁全团队并不满足于此。据透露,智能决策与协同控制研究所正在搭建这样一个平台,所有的载体一旦起飞,数据就会源源不断地传输到后方服务器,进而对数据进行二次挖掘,不断进行优化迭代。“对自然界未知的探索是无法完全预测的,环境在不断地突变,因此也要不断地调整算法。”鲁仁全说。
据了解,近五年,团队成员合作获得了30余项国家/省部级项目支持。团队成员各类奖项斩获颇丰,其中包括教育部自然科学一等奖2项、广东省科技进步一等奖1项、广东省自然科学二等奖1项。研究所已经申请专利100多项,其中30多项已经得到授权。
“国家对我们的投入是很多的,我们不能用这些投入在实验室里‘做玩具’,我们要去解决社会经济发展的问题。”鲁仁全坦言,面向科技前沿,团队做到了;面向经济‘主战场’,是团队迫切需要发力之处。目前,团队正在和企业协作将研究成果落地转化。
一专多能型团队
人人都是“多面手”
鲁仁全说,最初,团队专攻飞控系统的算法研究,买来现成的无人机,在二次开发平台下专门研究算法,比如无人机飞多高飞多远、怎样转弯、如何编队等。然而,团队很快就发现无论控制方法再好,对于他们想要实现的特定动作和功能,机器结构改变之后并不能达到预期。
买来的无人机实现不了特定功能怎么办?自己做!随着自主系统研究的开展,团队也慢慢变成了“多面手”,机械设计、制造、组装等都不在话下。记者在实验室看到,3D打印机、激光切割机、激光雕刻机……所需设备一应俱全。研究所副教授陶杰随手拿起一个螺旋桨叶片介绍道,它就是实验室用碳纤维原料通过3D打印加工而成的,重量和塑料差不多,但强度和钢相当。
“在不同特性、不同转速、不同力下,机身不同的位置都有不同的精度要求。”鲁仁全坦言,如果去买,市面上没有同一型号的,即便有,成本也很高,团队索性就自己动手解决。如今,除了电池,载体身上的主要零部件,甚至连伺服电机都是团队自主设计和制作的。
“慢慢就做起来了,越来越开阔。”鲁仁全介绍,从最初他一人“单枪匹马”,团队发展至今已有24位研究成员,分协同控制算法理论研究、水空无人机、陆空无人机、大型无人机、无人车、智能电网巡检等7个研究方向,带领博士后、博士生、硕士生共200多人,专业范围覆盖机械、自动化、计算机等多个领域。就在前不久,以鲁仁全为学科带头人的计算机科学与技术新增为一级学科博士学位授权点。
团队未来要朝哪个方向发展,这是鲁仁全必须思考的问题。为此,团队集体商议后也制定了一些规则,不同方向的每个具体位置都要有自己的规划。“不可能所有事情都能提前规划好,问题往往都是在做的过程中发现的,在解决问题中重新开始。”鲁仁全说。
文/广州日报全媒体记者王婧 通讯员卢迪
图/广州日报全媒体记者王文宇、黄泽胤
相关推荐
-
 陕西:深化职称制度改革 为高质量发展提供人才支撑
陕西:深化职称制度改革 为高质量发展提供人才支撑
-
 内蒙古11月第一周全区能源价格有涨有降
内蒙古11月第一周全区能源价格有涨有降
-
 山西多举措推进企业上市“倍增”最高奖补300万元
山西多举措推进企业上市“倍增”最高奖补300万元
-
 北京首个“碳中和”主题公园——温榆河公园·未来智
北京首个“碳中和”主题公园——温榆河公园·未来智
-
 全国第三例 远程指导颅脑手术 天坛医院张家口脑科
全国第三例 远程指导颅脑手术 天坛医院张家口脑科
-
 北京公交410路新发地村站车亭整修一新 等车也不用
北京公交410路新发地村站车亭整修一新 等车也不用
-
 沈阳快递行业第四届职工职业技能竞赛在苏家屯区举行
沈阳快递行业第四届职工职业技能竞赛在苏家屯区举行
-
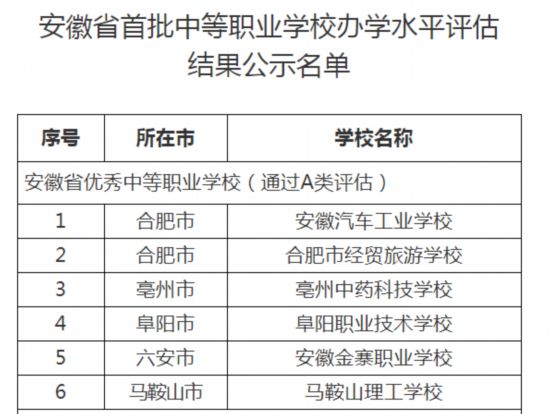 安徽省发布首批中等职业学校办学水平评估结果
安徽省发布首批中等职业学校办学水平评估结果
-
 9月13日郑州地铁开通+尾号限行 早晚高峰不再拥堵了
9月13日郑州地铁开通+尾号限行 早晚高峰不再拥堵了
-
 修理机构:认定泡水车维修后自燃风险加大 缺乏证据
修理机构:认定泡水车维修后自燃风险加大 缺乏证据
-
 郑州“中国仰韶文化博物馆”总投资85581万元 预计2
郑州“中国仰韶文化博物馆”总投资85581万元 预计2
-
 广西第一届职业技能大赛在广西南宁技师学院举行
广西第一届职业技能大赛在广西南宁技师学院举行
-
 9月6日下午兰州市七里河小学举行新生入学“开笔礼”
9月6日下午兰州市七里河小学举行新生入学“开笔礼”
-
 拉萨市打造智慧公交站台 让居民出行变得更加便捷
拉萨市打造智慧公交站台 让居民出行变得更加便捷
-
 陕西省新修订《物业服务管理条例》将于10月1实施
陕西省新修订《物业服务管理条例》将于10月1实施
-
 为再现鱼儿浅底美丽景象重现 云南省扛起牢赤水河流
为再现鱼儿浅底美丽景象重现 云南省扛起牢赤水河流
-
 福厦高铁集美特大桥首孔箱梁架设成功 标志着建设步
福厦高铁集美特大桥首孔箱梁架设成功 标志着建设步
-
 黄台联络线百米连续梁完成合龙 标志着胶济线明年牵
黄台联络线百米连续梁完成合龙 标志着胶济线明年牵
-
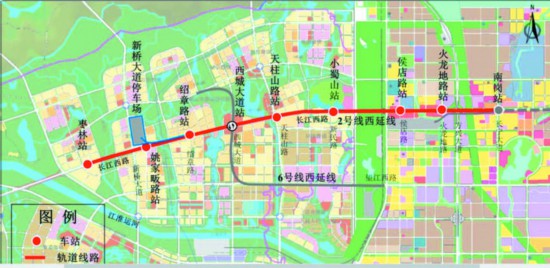 合肥市轨道交通2号线未来或直达小庙江淮运河区域
合肥市轨道交通2号线未来或直达小庙江淮运河区域